A body-mountable, four-degree-of-freedom parallel robot addresses the challenges of MRI-guided arthrography by enabling concurrent imaging and surgical intervention, reducing radiation exposure and procedural complexity, and enhancing patient safety through precise needle guidance and alignment maintenance.
Unmet Need
Current MRI-guided arthrography procedures involve multiple steps, including contrast injection and imaging. This can cause patient anxiety, increased radiation exposure, and higher healthcare costs due to the use of both fluoroscopy and MRI suites. Additionally, these procedures are challenging to perform accurately due to patient movement during surgical interventions.
Technology Overview
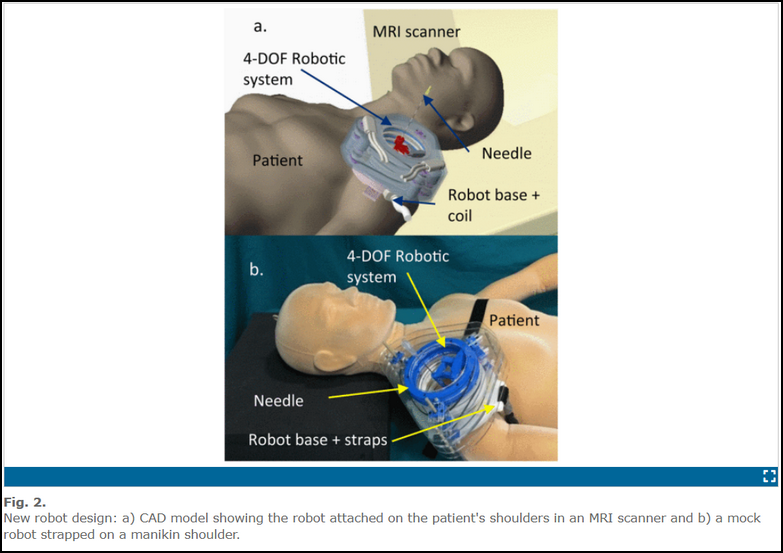
This invention describes an embodiment that can be used to precisely guide needles during percutaneous interventions under MRI-guidance. This system belongs to the class of patient-mounted robots. It has the advantage of being smaller since it does not require special support bases or frames and it can move with the patient to minimize any effects of patient motion. The robot has two circular stages each supporting a scissor mechanism. Each stage is comprised of two discs rotating about a vertical axis forming one ‘arm’ of a scissor mechanism. The two outer link bars of each stage are connected at the ends by a spherical joint, through which the needle guide passes. The spherical joint of both stages are connected by the needle guide, which is fixed to the joint of the inferior stage and may translate through the joint of the superior stage. Each spherical joint, as a stage end-effector, has 2 degrees-of-freedom (DOF) and together they provide 4 DOF for the needle guide. The motivation for the parallel mechanism arises from the issue of summing errors in the serial robots we previously developed for the same application. The new concept can achieve increased rigidity and decreased inertia for the component parts in motion. Moreover, having the motors and encoders connected at the base, the accompanying cables will be fixed and consequently cause less interference between the moving components and the sterile plastic drape. Finally, by eliminating the heavy parts in motion it is possible to achieve a stable center of mass for the robot and better positioning accuracy.
The robot ensures accurate and efficient surgical interventions by maintaining alignment during patient movement, reducing radiation exposure, and integrating MRI imaging with surgical procedures, thereby minimizing steps and improving patient safety and imaging sensitivity.
Stage of Development
The inventors have developed several generations of the device.
Publications
Kim,J et al. EMBC 2017 39 Annual International IEEE
Niravkumar Patel, Gang Li, Kevin Cleary, Iulian Iordachita,“39 - Body-Mounted Robots for Magnetic Resonance Imaging-Guided Percutaneous Interventions”, Editor(s): Mohammad Hossein Abedin-Nasab, Handbook of Robotic and Image-Guided Surgery (Second Edition),Elsevier, 2026, Pages 663-676, ISBN 9780443139123.
U.S. Patent 11,911,123
U.S. Patent 12,383,356
